



Airliners and multi-engines have their own rules. Flying is sometimes more demanding due to the wing geometry, but the choice of drive usually adds a thrill.
4 x electrical reliability in an airliner foam waffle, that may be the ideal introduction, but in terms of flying and technology it doesn’t really put experienced model pilots to the test.
However, things get much more exciting with two, three or even four combustion engines, whose forces affect the flight characteristics as their size increases.
As long as everything is running smoothly, a multi-motor flies more or less like a single prop. But if an engine fails, it can happen very quickly that the fate of the model depends on the skill of the pilot. Because:
Training is half the battle!
Shortly after take-off or on approach to land – the worst case! And what if the altitude is only enough to get in with a downdraft? In such situations, only routine helps, and where better to train than on a model flight simulator. If you want to prepare for day “X” and, above all, if you want to feel what it’s like to fly an airliner with just one engine, you shouldn’t think about it any longer, but rather try it out often enough!
Preparations of the RC transmitter
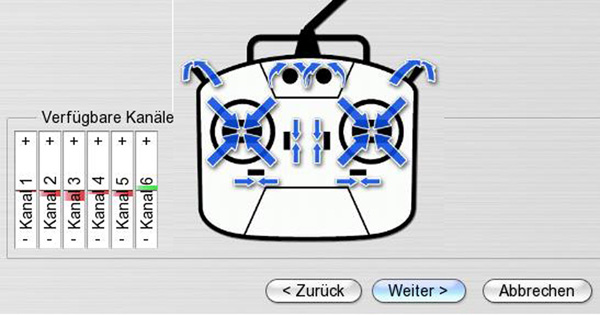
Before training and especially before calibrating the transmitter in the aeroflyRC, the transmitter must be programmed so that the throttle stick no longer addresses the gas channel directly, but rather two separate channels on the left and control the right motor. In this example these are channels 5 and 6. If both mixers are active, both motors also run synchronously. By switching off a mixer or specifying a specific gas position, the second engine “joys” begin…
Basic settings in the aeroflyRC
It starts with a new model memory in the transmitter and the calibration of the control signals in the aeroflyRC8. The only special feature here: When calibrating the transmitter signals, in addition to the throttle stick on channel 1, the two mixed sensors 5 and 6 are also taught in, which then later control the left and right motors separately.
Gas split
After successful calibration and a short test run with the DC-3, the channel assignment of the opened gas function is changed as follows in the control unit menu “Assign Controller Professional” as shown in the figure on the right:
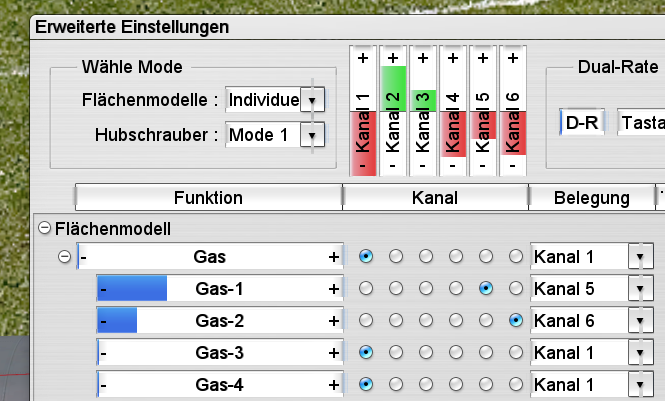
The button in line “Gas-1”: (=left motor) is set to channel 5.
The button in line “Gas-2”: (=right motor) is set to channel 6.
So, with these basic settings we can make our first attempts:
First get into the air with the active mixers on both engines! But then pull an external engine to idle and let physics do its merciless job…
The first surprise will be big, circling over the stopped engine can end badly, a turn is very easy to initiate but you can hardly get out of it! You quickly learn that in many situations it is better to also pull the other engine to zero power instead of trying to somehow get the asymmetrical thrust distribution under control.
Basic settings for intensive training
 Just quickly bringing the outer engines to idle, that can only be the beginning. The next step is to try to switch off one of the motors completely, also to get the look of a standing prop.
Just quickly bringing the outer engines to idle, that can only be the beginning. The next step is to try to switch off one of the motors completely, also to get the look of a standing prop.
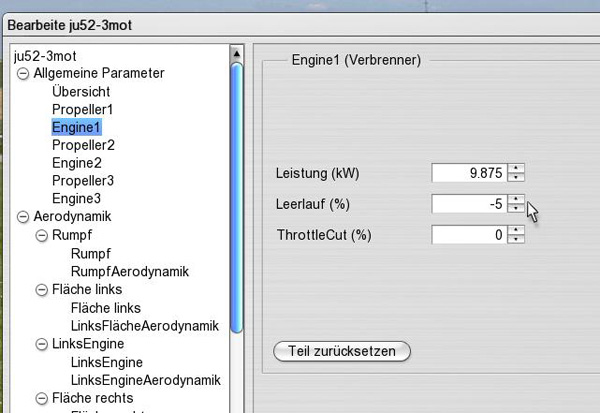
In order to individually regulate the engines down to prop standstill, we first open the model editor in the aeroflyRC8 via “Edit model” and set the idle speed for the engines to -5%. If the gas channel is now set to idle, the props stop. Training makes even more sense if initially both engines follow the accelerator stick and the emergency can be triggered with a switch.
Multi-motor simulation almost without limits
By specifically deactivating the two mixers for the external motors, all possibilities are now opened up, the programming of which can also make sense in reality.

- Program a switch on the transmitter side, which, for example, only reduces the power of one motor and allows the other motor to continue to run synchronously with the throttle stick.
- Program a switch on the transmitter side, which, for example on the Ju52, switches off both outer motors so that only the middle motor can reach the place.
- Transmitter-side programming of a switchable mixer that acts from the rudder on the outer motors, e.g. to improve maneuvering on the water in a flying boat. The TwinOtter in the aeroflyRC8 is a grateful test object here.
With these few settings, all emergency situations can be trained up to routine safety.
- Landing approaches from every conceivable starting situation with turns only via the running prop.
- Landings in crosswinds with a stationary engine.
- Failure of a throttle servo (e.g. an engine remains at full throttle).
- Failure of an engine during the landing approach.
Everything on this